Offers in: Mechanical Engineering
Academic Supervisor:
Luis Vitores Valcarcel Garcia / Cristina Rodriguez
department Tecnun CEITTecnun:
CEIT - ICT Division / PTM
subjectarea :
Mathematical Optimization, Data Science, Materials.
Description and Objectives:
development of a robust software application (preferably in Python) for parameter optimization of material constitutive equations (known models in the literature).
The goal is to automate the task of fitting models to experimental data (read from Excel/CSV) to predict mechanical properties. It is required to compare different optimization algorithms to determine the best fitting strategy. The project should be integrated or be the basis of an existing application.
Proposed Activities:
-
Literature review of constitutive models and optimization algorithms.
-
Mathematical formulation of the optimization problem (error function).
-
Implementation of data reading (Excel/CSV) and constitutive equations.
-
Implementation and comparison of at least two optimization algorithms (e.g., Levenberg-Marquardt vs. Genetic Algorithms).
-
development the Username interface for loading, adjustment and display of results.
-
Validation and analysis of the effectiveness of the software and algorithms applied.
Academic Supervisor:
Luis Vitores Valcárcel García
department Tecnun CEIT:
ICT Division
subjectarea :
Mathematical Optimization, Data Science
Description and Objectives:
development of a Python application to automate exploratory data analysis (EDA) and predictive regression modeling.
The goal is to build a tool able to read a database (CSV/SQL), automatically classify variables (numerical, categorical), perform univariate and bivariate statistical studies (correlations, graphs) and, finally, automatically apply and compare regression models for a variable of interest. The goal is to offer a robust software for the quick start of Data Science projects.
Proposed Activities:
-
Review of AutoEDA and AutoRegression techniques.
-
Intake module : Data reading and automatic classification of variables.
-
EDA module : Implementation of statistical studies and automatic graphs (univariate and relationship between variables).
-
Regression module : Automatic preprocessing and fitting/comparison of multiple regression algorithms (simplified AutoML).
Username interface: development of an interface (e.g., Shiny) for the visualization of results and insights.
Academic Supervisor:
Luis Vitores Valcárcel García
department Tecnun CEIT:
CEIT - ICT Division
area subject:
Mathematical Optimization, Data Science
Description and objectives:
The maintenance scheduling problem, known as the Maintenance Scheduling Problem or Maintenance Scheduling Problem, consists of organizing maintenance activities within a schedule in an optimal manner. This problem seeks to minimize interruptions and operating costs by ensuring that both preventive and corrective maintenance are performed at the appropriate times.
The goal of this final Degree project is to develop an optimization tool that addresses the efficient scheduling of maintenance schedules. The tool will be developed preferably in Python, with additional Matlab or R options.
Proposed activities for the student:
Bibliographic review of the most common optimization problems and algorithms applied in maintenance scheduling.
2. Mathematical formulation of the problem, establishing the relevant criteria and restrictions.
3. Implementation of the solution using a heuristic optimization algorithm or open source solvers.
4. Analysis of results and comparison of the effectiveness of the applied approach , with recommendations for its use in different maintenance situations.
Academic Supervisor:
Beñat Elduayen
department Tecnun/Division CEIT:
Water and Waste Division
area subject:
Mathematical modeling and numerical simulation.
Description and objectives:
Mathematical modeling and simulation tools assist in design, operation and optimization of water treatment infrastructures. This project, focuses on using EPANET, a software that allows predicting the hydraulic and water quality behavior along a pipeline network .
Water distribution networks are complex and time consuming to fully simulate. The project focuses on developing an algorithm to simplify water distribution networks automatically using Python and EPANET. This simplification will allow faster simulations, which are the basis for creating tools from financial aid to real-time operation. The student is expected to apply his/her theoretical knowledge in the areas of numerical computation, mathematical modeling and programming to contribute to develop an innovative digital tool that positively impacts the sustainability and efficiency of water resources.
Academic supervisor:
Ainara Rodríguez - Isabel Ayerdi
Division CEIT:
Materials and Manufacturing. Advanced Manufacturing in Powder Metallurgy and Laser Group.
Description and objectives:
Laser functionalization of surfaces is an approach widely used in a wide variety of applications and sectors, as it allows to provide final products with added functionalities, including, among others, decorative effects, the ability to repel liquids or improve the adhesion of coatings. At the moment Ceit is developing an international project of research and development in this last field, whose goal is to improve the adhesion of antibacterial and antiviral coatings to high traffic objects such as handles, switches or push buttons.
In the framework of this project in cooperation, a TFG is proposed whose goal is the design and implementation of a test bench for the characterization of the surface properties of the manufactured samples, among which are the improvement of adhesion, hydrophobicity/hydrophilicity characteristics or optical properties among others. In addition to the above, it will be necessary to implement an intelligent processing system for the data obtained by the measuring elements.
Academic supervisor:
Yago Olaizola
Division CEIT:
Materials and Manufacturing. Advanced Manufacturing in Powder Metallurgy and Laser Group.
Description and objectives:
Transparent materials are currently used in a multitude of applications in which their optical properties are particularly relevant: lenses, devices for optical communications, smart glasses or optical sensors, among others. In this context, the characterization of the optical properties is a point core topic in the development of the devices.
The goal of this project will be to design and implement an optical microscopy system, starting from different optical and mechanical elements, for the analysis of certain properties of transparent materials. After the validation of the equipment, we will proceed to study the optical behavior of this substrate subject after different laser engraving processes. In parallel, it will be necessary to implement an intelligent processing system for the data obtained by the measurement devices.
Academic supervisor:
Gemma García Mandayo
Division CEIT:
Materials and Manufacturing. Advanced Manufacturing in Powder Metallurgy and Laser Group.
Description and objectives:
The project is framed within the development of an innovative system for the measurement of erythrocyte sedimentation rate (ESR) and coagulation, for application in clinical diagnostics. The main purpose of the system is to provide results of ESR and/or blood coagulation in a minimum time, with a minimum amount of sample and using sustainable materials, offering significantly higher performance than the devices currently available in the market, and thus allowing a faster and earlier diagnosis of pathologies such as infections, tumors or autoimmune diseases.
The goal of project is the optimization of the sample characterization processes, developing a test bench and performing tests to improve the performance of the device.
Academic supervisor:
Leticia Zamora Cadenas - Iker Aguinaga Hoyos.
Division CEIT:
Information and Communication Technologies. Intelligent Systems for Industry 4.0 Group.
area thematic:
Telecommunication/Industrial Engineering
Description and objectives:
Indoor location systems are a booming element in recent years. Whether using radiofrequency technologies, inertial sensors or artificial vision systems, the location of objects or people in interior spaces is an element core topic in many applications (tracking of parts, access to security areas, tracking of people, augmented reality, etc.).
To determine and evaluate the accuracy of a location system, the most common method is to measure guide a number of control points or tests in a controlled environment to determine the accuracy of the system. However, this subject measurement is always subject to measurement errors, human error, and the impossibility of tracking a moving element in real time. Another widespread option, especially when the accuracy is to be evaluated dynamically, is to resort to cost-effective systems that allow the creation of the real path or "ground truth", such as, for example, vision tracking systems. However, it is not always possible to deploy this type of system subject , or the economic means to do so are not always available. Therefore, being able to evaluate the accuracy of indoor positioning systems at a low cost is still a problem that researchers and companies are trying to solve.
Currently Ceit has a line of research associated with positioning systems for indoor spaces, in which it works with various companies to provide solutions to their needs. This is why the need for a ground truth system that is easy to install and not too expensive was born.
The task of this GFP would be to develop a ground truth system, using virtual/augmented reality systems, for subsequent use in evaluating the accuracy of the proprietary indoor location system Ceit. HTC Vice, Oculus Quest and Hololens 2 hardware are available for the development of this system using the Unity3D programming platform. The candidate must have programming skills in C# or similar languages such as C++ or Java.
Academic Supervisor: Borja Prieto.
Division CEIT: Electric Vehicle and Smart Grids.
area subject: Electrical Engineering.
Description and objectives: ELMER is an open source multiphysics simulation software. It allows to simulate the behaviour of a multitude of physical processes such as: the operation of electrical and magnetic components, the heating of solids, mechanical vibration and resistance, fluid movement and snow melting, etc.
In this project it is intended that the student becomes familiar with ELMER and learns to simulate the multiphysics behavior of a coupled system, e.g. heat generated in a part by applying magnetic fields and temperatures at which this heating occurs.
Academic Supervisor: framework Satrústegui.
Division CEIT: Electric Vehicle and Smart Grids.
area subject: Electrical Engineering.
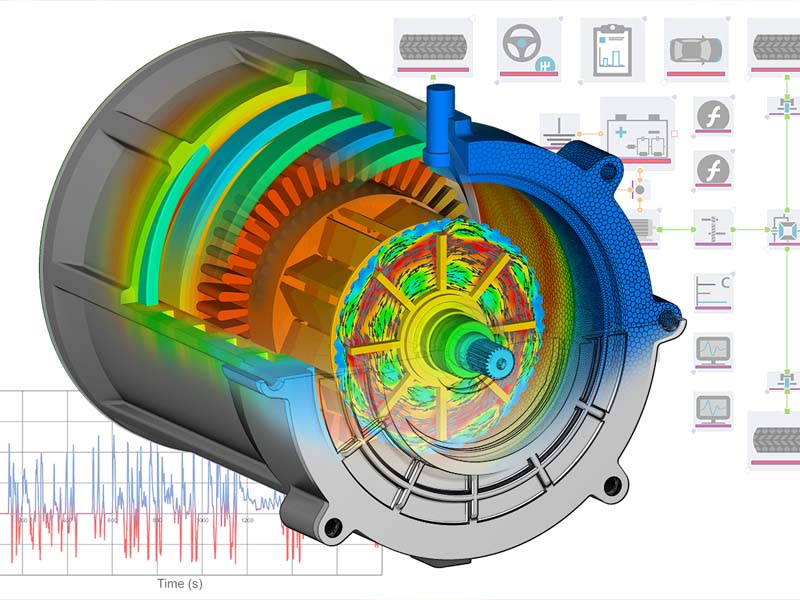
Description and objectives: The noise generated by electric motors is becoming increasingly important due to the fact that it is embedded in systems where comfort is a very important aspect (e.g. electric cars). In this sense, this PFG tries to characterise the noise in an electric motor by performing a multiphysical analysis, starting by characterising the machine at an electromagnetic and thermal level and then developing a mechanical analysis that results in obtaining the noise generated at different levels of torque and rotational speed.

Academic Supervisor: Jesús Paredes.
Division CEIT: Electric Vehicle and Smart Grids.
area subject: Electrical Engineering.
Description and objectives: During the last decade, many of the aircraft auxiliary systems (pneumatic, hydraulic and mechanical) have been replaced by electric or hybrid actuators, due to incentives for the reduction of greenhouse gas emissions and the reduction of operation and maintenance costs. This has led to a considerable increase in the electrical power installed in aircraft.
Traditionally, the turbines were started by a pneumatic system and the energy needed to power the aircraft's electrical systems was produced by generators coupled to the turbines. Today, the two systems have converged into a single electrical machine capable of working as both an engine and a generator. These systems include aircraft turbine starter/generators. The increasing demand for electrical energy and the limited space for starter/generators make it necessary to increase the power density of these machines.
The size, and therefore the weight and cost, of an electrical machine is primarily determined by the heat extraction and temperature limit of the materials used in its manufacture. Oil cooling systems have promising characteristics. Among all the oil cooling systems (spray, oil-dripping...), we intend to address in this project the oil-flooded stator systems.
The goal of this project is that the student are familiar with simulation tools fluid and cooling systems and to draw conclusions in order to optimize oil cooling systems for aircraft engines.
Academic Supervisor: Gurutz Artetxe.
Division CEIT: Electric Vehicle and Smart Grids.
area subject: Electrical Engineering.
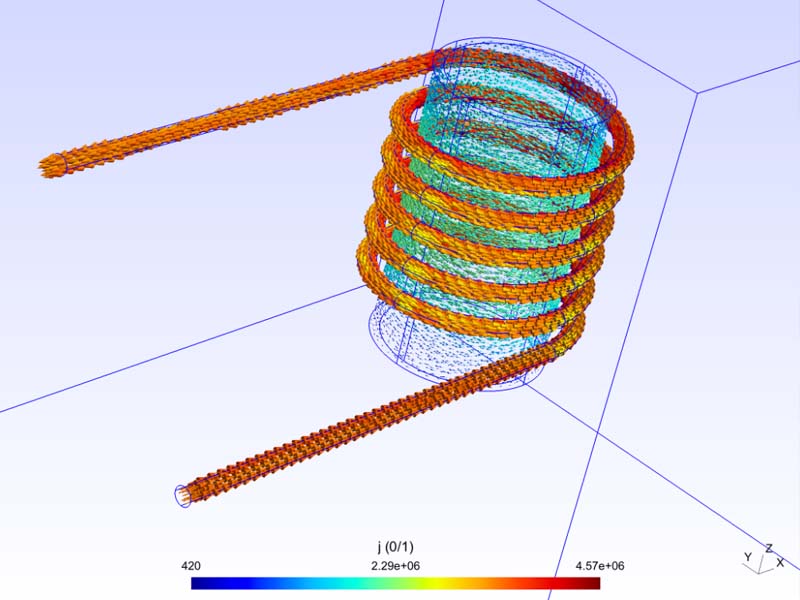
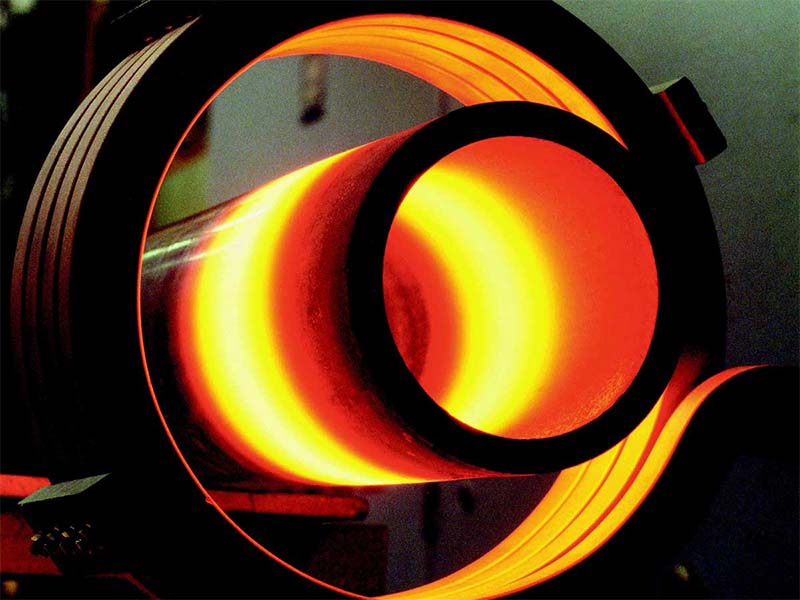
Description and Objectives: Induction heating is an efficient and fast method of generating heat. It can be employee in various applications where tempering, brazing or melting of metals is required. CEIT is interested in developing computational tools (based on a set of previously developed tools) for use in the design of induction heating systems for formwork. The goal of this project is to model the electromagnetic and heating behavior of a formwork heating system and to perform optimization studies with them in order to carry out the design of a practical case.
summaryThe goal of project is the development and fabrication of a directed illumination system. This system will be mounted on a camera and will allow to record the specimens at the same time as they are mechanically tested. The system to be developed has to illuminate the specimen to be filmed from several points simultaneously. Likewise, it must be possible to modify the light sources in guide by means of an arduino. During the project , parts have to be designed and manufactured by 3D printing, LEDs have to be mounted on the manufactured parts and an arduino has to be programmed and connected to be able to control the switching on and off of the light sources.
profile of the student: Ideally a student of design, industrial technologies, mechanical or biomedical engineering. Experience in arduino programming and design 3D CAD would be an asset.
Application: Send CV, along with academic record and a paragraph of about 300 words of motivation explaining the suitability of your profile for the realization of this project.
Supervisor of project: Dr. Javier Aldazábal
deadline and resolution: Students who wish to apply must do so before the end of October and the selection of candidates will be made in November in order to start in December or January.
-
area/department Ceit / Tecnun: area of Thermal and Fluid Engineering - department from Mechanical Engineering (TECNUN)
-
area thematic: Mechanical Engineering
-
profile recommended: Degree en Ingeniería en Tecnologías Industriales, Degree en Mechanical Engineering, Degree en Ingeniería en design Industrial y development de Productos
-
Academic Supervisor: Gorka Sánchez Larraona
-
Title: Simulation of flow and heat transfer in curved ducts. Application in the cooling of gas turbine blades.
-
Description and Objectives:
The project consists of studying the flow and heat transfer that occurs in circular and square section ducts when they are bent 180º forming a U. For this purpose, three-dimensional simulations will be carried out using the ANSYS Fluent code and the results obtained will be compared with experimental measurements. The case in which the ducts rotate at high speed with respect to an axis will also be considered. This case has a direct application in the cooling of gas turbine blades.
Academic supervisor:
Iker Aguinaga
department Tecnun/Division CEIT:
CEIT. Intelligent Systems for Industry 4.0 Group.
area thematic:
Robotics
Description and objectives:
SLAM (Simultaneous Localisation and Mapping) algorithms are the basis for navigation systems in robotics and autonomous cars. These algorithms integrate information from different sensors such as cameras, leader, or others. Graphs are a data structure that allows structuring this data for further analysis. In this case the graph is defined by a set of nodes that define the different positions travelled and links that connect related positions (because they are the previous step or because they represent similar positions in space.
The goal of the PFG is the development of a bookshop of graphs in the Python language that allows to define the structure of a graph in a flexible way to build a SLAM algorithm on it.
The student will be in charge of defining the data structure and different algorithms. It will also develop tools to validate the correct functioning of the network and tools for its visualization.
Academic supervisor:
Iker Aguinaga
department Tecnun/Division CEIT:
CEIT. Intelligent Systems for Industry 4.0 Group.
area thematic:
Robotics
Description and objectives:
Point clouds are one of the most common data types in robotics. Many sensors such as LIDAR or RGB-D cameras directly provide a point cloud, which is then used for tasks such as object and obstacle detection, navigation, etc.
One of the most common tasks is the alignment of two point clouds representing the same geometry from different viewpoints. The ICP (Iterative Closest Points) algorithm is the basic algorithm to perform this task.
The goal of the project is to develop an algorithm that implements the ICP algorithm in the C++ programming language (starting from an example in Python). For this purpose, the bookshop Eigen will be used. Eigen is a computational bookshop of high performing with an interface similar to Matlab but a much higher performance.
The student will develop a tool to import two point clouds, align them and generate the necessary information for their visualization (in Python or Matlab).
Academic supervisor:
Iker Aguinaga
department Tecnun/Division CEIT:
Intelligent Systems for Industry 4.0 Group at CEIT
area thematic:
Robotics
Description and objectives:
Point clouds are one of the most common data types in robotics. Many sensors such as LIDAR or RGB-D cameras directly provide a point cloud, which is then used for tasks such as object and obstacle detection, navigation, etc.
One of the most common tasks is the alignment of two point clouds representing the same geometry from different viewpoints. The ICP (Iterative Closest Points) algorithm is the basic algorithm to perform this task.
The goal of the project is to develop an algorithm that implements the ICP algorithm in the C# programming language (starting from an example in Python). The student should identify the most appropriate mathematical calculation libraries to perform the development.
The student will develop a tool to import two point clouds, align them and generate the necessary information for their visualization (using Unity3D).
Academic supervisor:
Jorge Juan Gil.
department Tecnun/Division CEIT:
CEIT. Intelligent Systems for Industry 4.0 Group.
area thematic:
Systems and Control Engineering
Description and objectives:
So far the control concepts are shown on the blackboard, by means of simulations or with videos. For the Control Engineering subject we want to build a mechanical control system (two pendulums coupled with springs) to be used for teaching purposes: to show in class the different behavior of the system before several controllers. To ensure portability, the system will be controllable through USB by means of an ARDUINO card . In a previous project the mechanical system has been built. In the proposed project several controllers will be programmed in C, in particular, a proportional-integral (PI) controller that allows "teleoperation" (that the Username moves one of the pendulums and the other one follows its movement without error in permanent regime).